1. Digitale 3D-Analyse
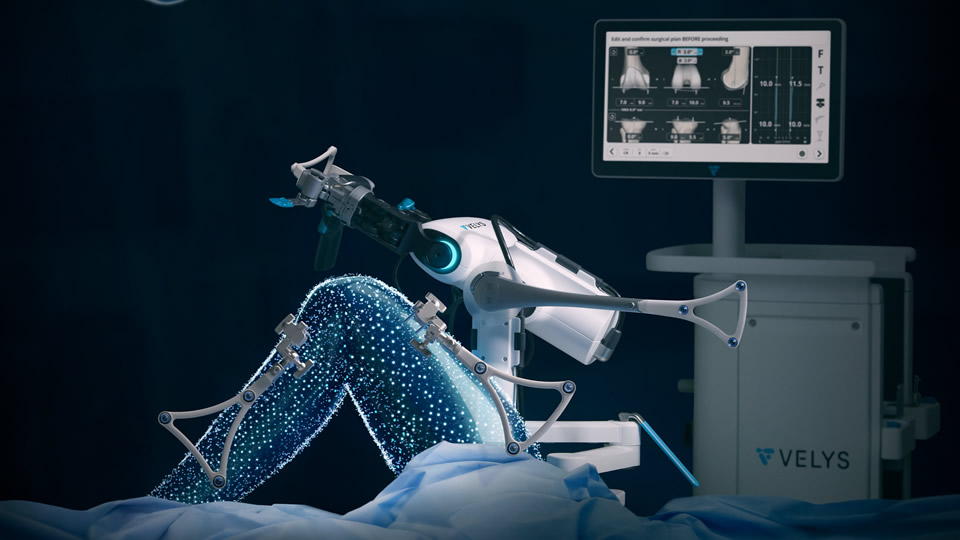
Zunächst werden Infrarotmarkierungen am Ober- und Unterschenkel angebracht.
Mit einer speziellen Sonde wird die Oberflächenanatomie des Kniegelenks erfasst. Die Software erstellt daraus ein exaktes dreidimensionales Modell
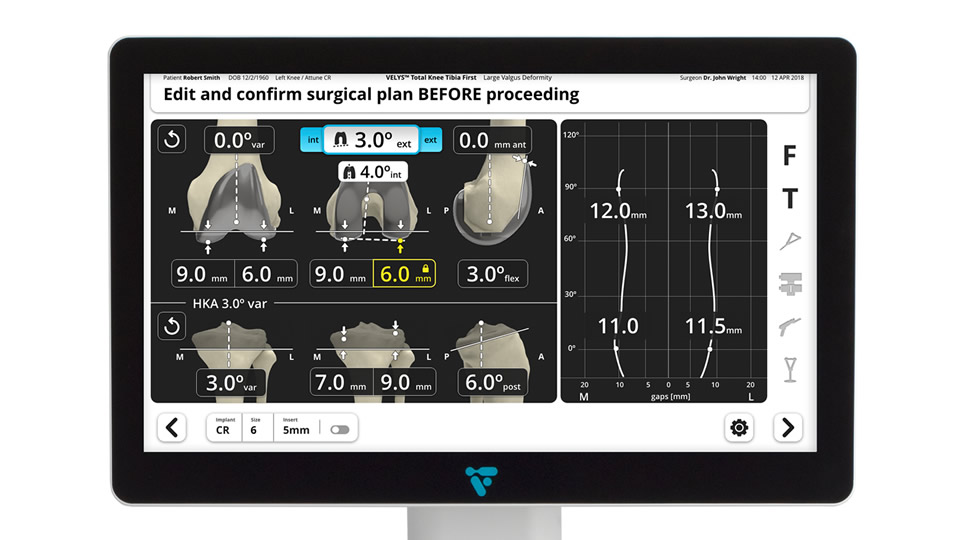
2. Simulation und präzise Planung
Implantatposition, Achsausrichtung und Bandspannung können simuliert werden.
Die Auswirkungen verschiedener Implantatpositionen auf Bewegungsachsen und Weichteile werden bereits vor dem ersten Schnitt berechnet. Dadurch ist eine individuelle Feinabstimmung möglich.
3. Exakte Umsetzung
Erst nach finaler Festlegung führt der Chirurg die Operation durch.
Der Roboterarm verhindert Abweichungen und ermöglicht hochpräzise Schnitte im Millimeterbereich. Die Steuerung bleibt jederzeit beim Operateur.